12 /
August /
2015
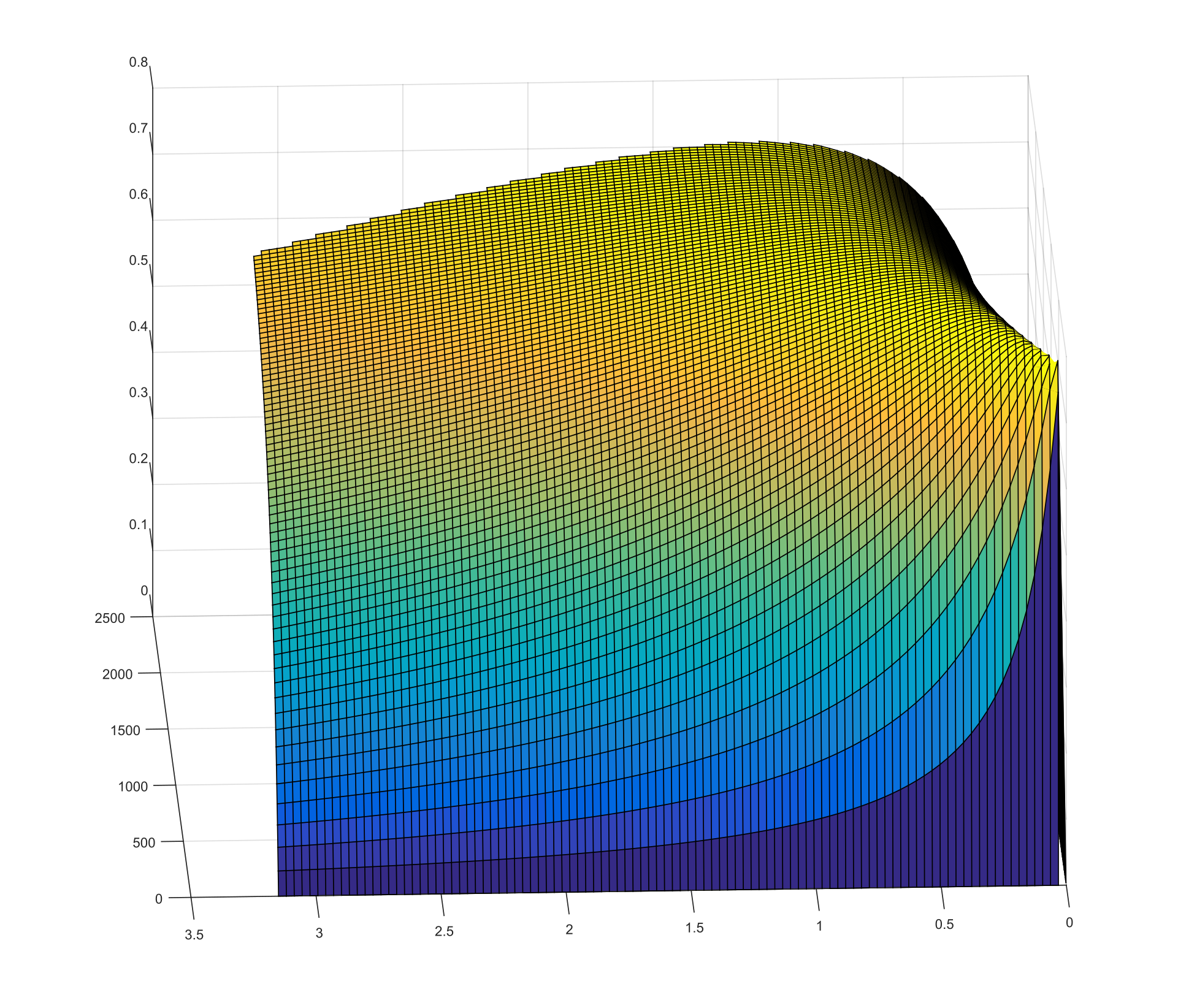
Characterizing a CIM motor in MATLAB
In which your protagonist characterizes a horrifically underpowered motor for use in an EV.

20 /
June /
2015
Megantereon: The Waterjet Paradox
In which your intrepid engineer-to-be explains the impossiblity of getting parts for a go-kart cut on an abrasive waterjet machine.
13 /
October /
2014
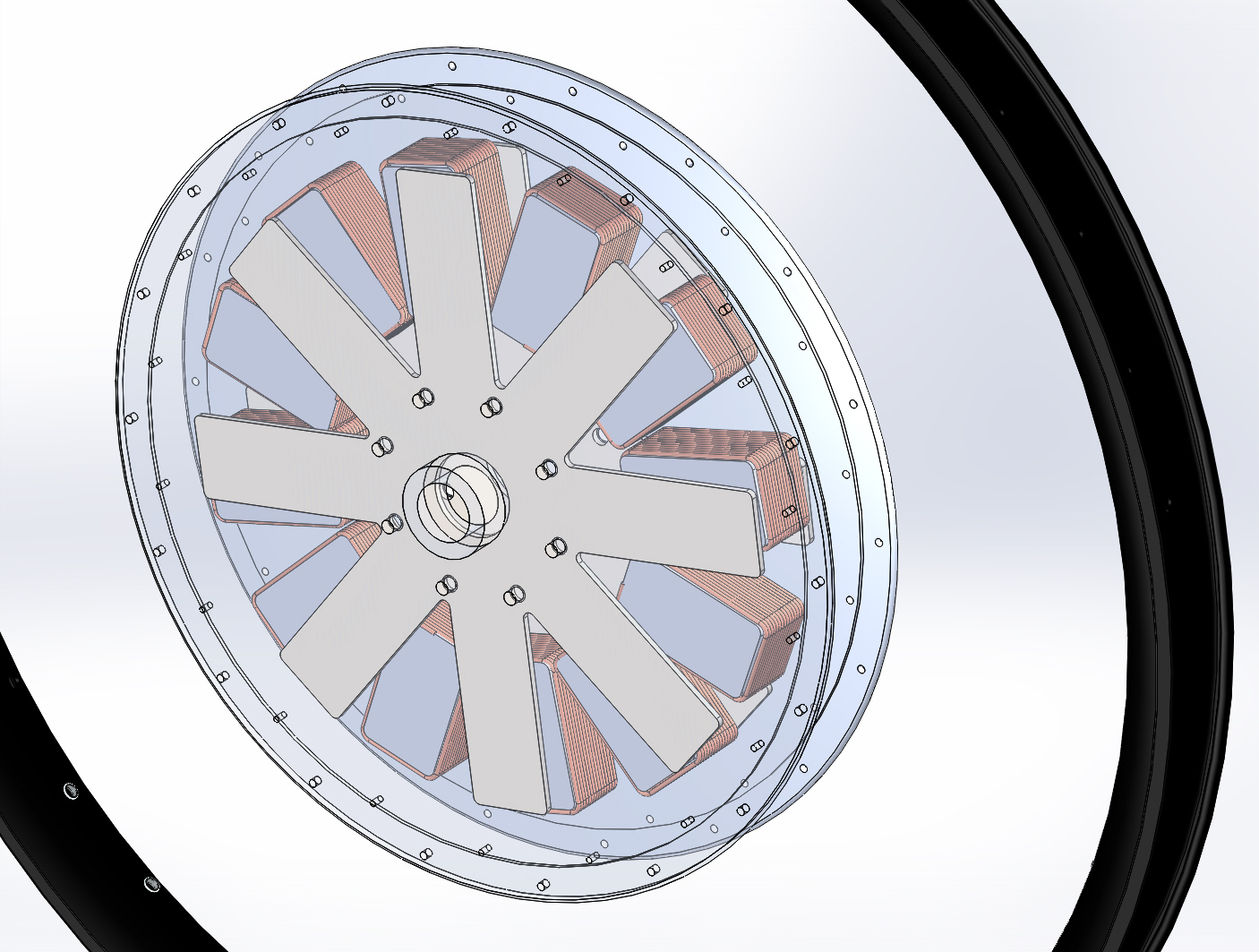
SRM-based Bicycle Electrification
Where two young, intrepid engineers attempt to electrify two bicycles for under $200 using an odd motor without any magnets.

06 /
May /
2014
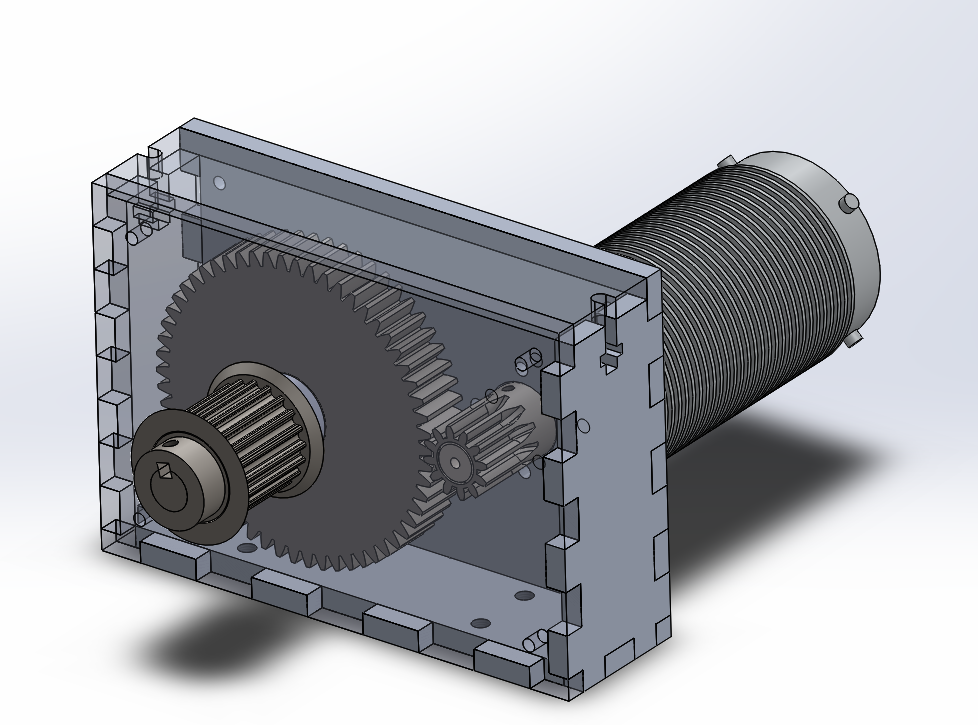
Megantereon: Frame
So last time I covered the basic drivetrain design. Now I'll get to the CAD design of the go-kart itself.
04 /
May /
2014
Introduction to Megantereon (and some physics calculations)
Where your intrepid engineer to be attempts to make an electric gokart that goes 35 mph with 80/20 aluminum extrusion.
22 /
April /
2014
First Post!
And, unfortunately, like any other first post, this will be weird and awkward, so i'll just cut to the chase.